這裡是「Three.js學習日誌」的第5篇,本篇的主旨是要介紹一些在Three.js中,一些常用的基礎操作,這系列的文章假設讀者看得懂javascript,並且有Canvas 2D Context的相關知識。
想要學習Three.js,首先當然要先練習一些基本的操作,這邊我們會先從形變,向量 開始。
Three.js的向量類一共有3種,分別是Vector2,Vector3,Vector4,它們各自代表著二三四維空間的向量。
如果你對向量這個名詞很不熟悉,那麼你也許可以看看我去年寫的文章
這些向量物件都各自有提供各自的運算方法,這邊我們來介紹幾個比較常用的操作:
.add/sub/multiply/divide:也就是向量的四則運算,要特別注意的一點是,這些運算方法都不是pure function,他們會回傳已經做過運算的自身。.length: 也就是求取向量的絕對值,也就是長度,例如假設有一個向量是(a,b),那麼它的絕對值就是√(a^2+b^2)normalize: 單位向量化,意思就是說把向量轉變成一個方向不變,但是長度只有1的向量。normalize最大的用處通常在於決定朝向,像是如果要指定往某個方向射出一顆球,通常就是先設法取得射出方向的單位向量,接著就可以再透過multiply來決定速度的大小。lerp: 其實就是大家國高中都學過的內插法,或是叫做線性映射。假設今天我們用(a,b)這個向量發動lerp方法,那我們要傳入一個端點向量(c,d),還有一個浮點數(假設是0.6),這樣意思就是要去取得(a,b)轉變到(c,d)的過程中,處於60%變化的那個點所代表的向量(特別注意,lerp本身也不是pure function)。set: 最後介紹的是最常用的set,顧名思義就是可以直接設定xyz座標值。四維的向量比較特別一點,這個接著會提到。
說到形變,那當然就是Translate/Scale/Rotate三劍客。常常寫CSS的前端工程師應該都跟它們混得很熟。
Three.js的平移,有2種比較常見的方式。
其中一種是我們在前面的Hello World也用過的Object3D.position。
Object3D.position本身的型別是Vector3,也就是三維向量物件,所以理所當然的,我們可以用上面介紹過的各種方法,比方說四則運算來定義物體的位置。
第二種則是只有Geometry類才可以使用的translate方法。
假設我們把mesh比喻成一個3D物件的"外層",Geometry則是它的"內層",當Geometry被下了translate時,它其實不會影響到Mesh的position屬性。
關於Geometry.translate有一點要注意的就是它是一種one-time-operation,意思就是說它只能在生成Mesh之前被操作一次,renderer在render的時候並不會去偵測Geometry.translate的改變。
縮放其實跟平移差不多,有Object3D.scale也有Geometry.scale(Geometry.scale也同樣是one-time-operation),這邊就不描述太多。
首先跟前面一樣,Three.js的旋轉,也同樣有Object3D和Geometry的版本。
但旋轉其實是形變中最複雜的一個部分,為什麼說它複雜?
首先我們來看一下官方文件Object3D.rotation這個屬性。

它的型別叫做Euler,這個Euler代表的是歐拉角, 所謂的歐拉角可以想像成一種朝向。
這邊我自己畫了一張簡單的圖來解釋,圖片左邊是一個球體,它的球心剛好就落在座標軸原點(0,0,0)上。

噢對了,Three.js的座標軸基本上就跟這張圖左半邊一樣,Z軸會朝向螢幕,而y軸則是朝向上方。
在這個時候,我們可以把靜止的xyz三個軸當前所構成的朝向視為一種狀態,我們把它的數值訂為(0,0,0),而接著當我們把這個坐標系跟著球一起旋轉,直到變成圖片右邊x'y'z'的狀態時,我們可以用一組參數(a,b,c),來表示xyz軸各被轉動了多少度(Radian),這組參數(a,b,c)就是歐拉角的數值化定義。
透過坐標系跟著球一起旋轉所定義出來的這種歐拉角,我們稱之動態歐拉角。既然說到動態,那麼當然也就有靜態,不過靜態歐拉角跟Three.js比較沒有關係,所以這邊不特別提。
這邊其實有一點要特別注意的:
歐拉角旋轉其實存在順序差異,也就是先轉x軸,再轉y,再來z,還是先y再z接著x,最後的結果會有差。
three.js其實有提供一個方法可以讓使用者重新定義旋轉順序。
Euler.reorder(string)
//可以輸入例如'XYZ','YXZ'這樣的字串值來決定旋轉的順序
到了這邊,好像還不是很複雜? OK ~

接著我們要來講講歐拉角旋轉的一種異常狀況: 環架鎖定(gimbal lock)
環架鎖定是一種只有動態歐拉角(就是坐標系跟著物體一起旋轉)才會出現的一種BUG。
這邊我思考了很久,不過還是想不到有比影片更快更好的解釋方法,所以還是決定放上影片了。
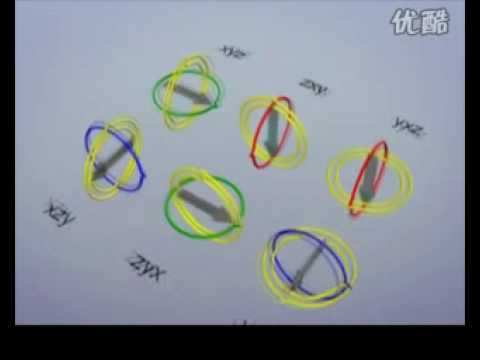
環架鎖定的問題通常是發生在動畫中。例如鏡頭的旋轉,在某個時間點突然變得很不自然,但是實際排查程序卻又找不到問題(因為問題是來自於動畫補間所產生的數值變化)。
要避免環架鎖定問題,最好的方法就是使用另外一種旋轉方法,也就是四元數(Quaternion)。
於是又出現了一個看不懂的名詞,這次是真的看不懂QQ
所謂的四元數其實是一個數學的專有名詞,通常大量的出現在大學線性代數的課本裡面,它的意義就是用來代表四維空間中的一個點,但是它為什麼可以用來表示一個3D物體的旋轉呢?。
這可能要請真的有修過線性代數的人來解釋了,小弟我只有修過工數,實在不敢隨便誤人子弟QQ。
Three.js 的四元數類可以在Object3D底下找到:
Object3D.quaternion
Object3D.quaternion最常用到的方法之一就是quaternion.setFromAxisAngle,這個方法可以透過輸入一個旋轉軸向量,搭配一個角度(Radian),這樣就可以實現繞軸轉動。
關於向量與形變的描述差不多就到這邊,接著下一部分會講到顏色/動畫循環/群組 等操作。
https://openhome.cc/Gossip/ComputerGraphics/QuaternionsRotate.htm
https://zh.wikipedia.org/zh-tw/%E7%92%B0%E6%9E%B6%E9%8E%96%E5%AE%9A

